
この記事の内容
- \(3\)点の座標から角度を求める方法
- \(3\)点の座標から回転方向を求める方法
- 角度と回転方向を求めるプログラム
こんにちは、Youta(@youta_blog)です。
今回は、座標平面上の\(3\)点の座標から角度と回転方向を求めるお話です。
あなたは学生時代、次のような問題を見たことはありますか?
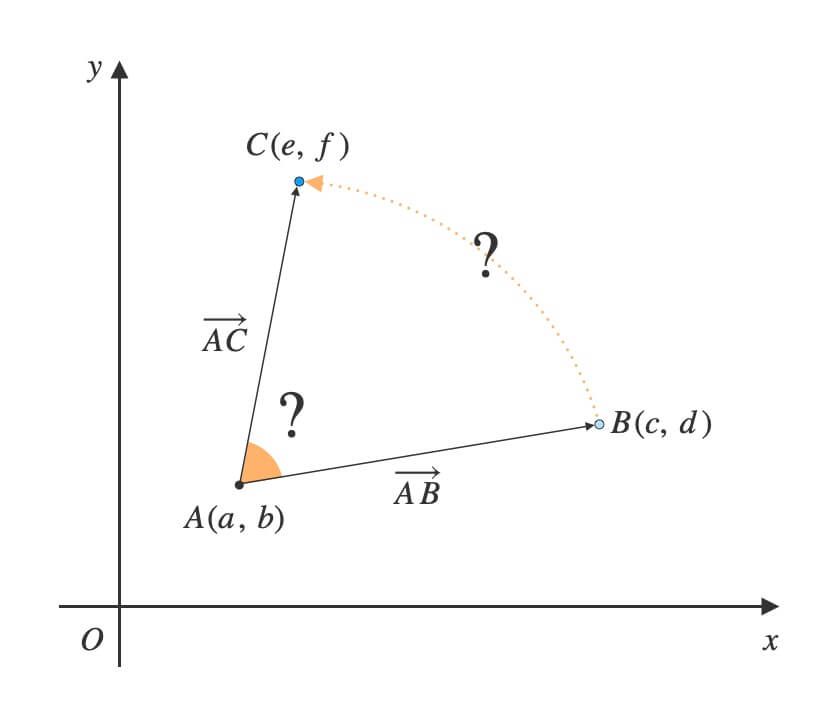
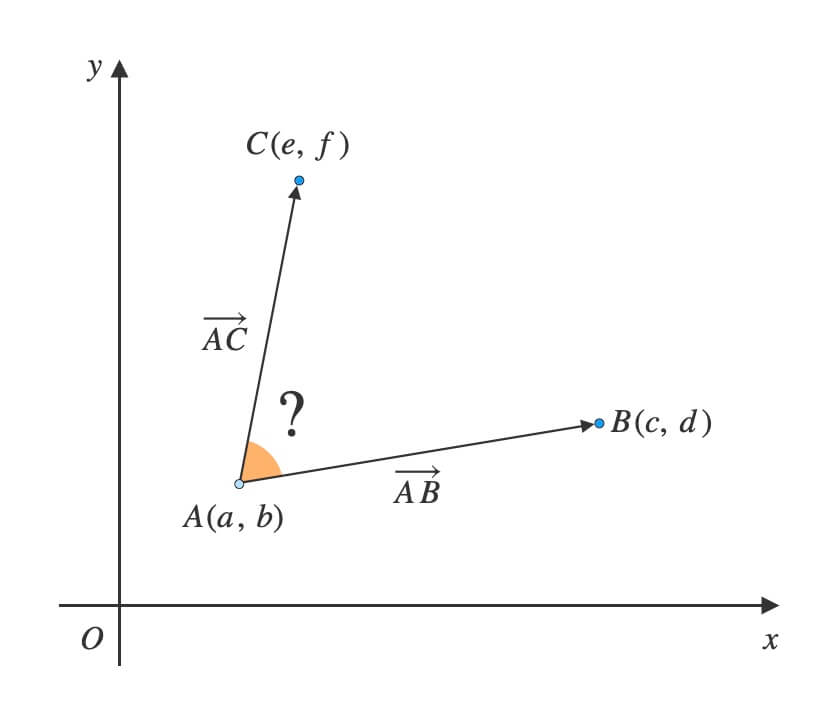
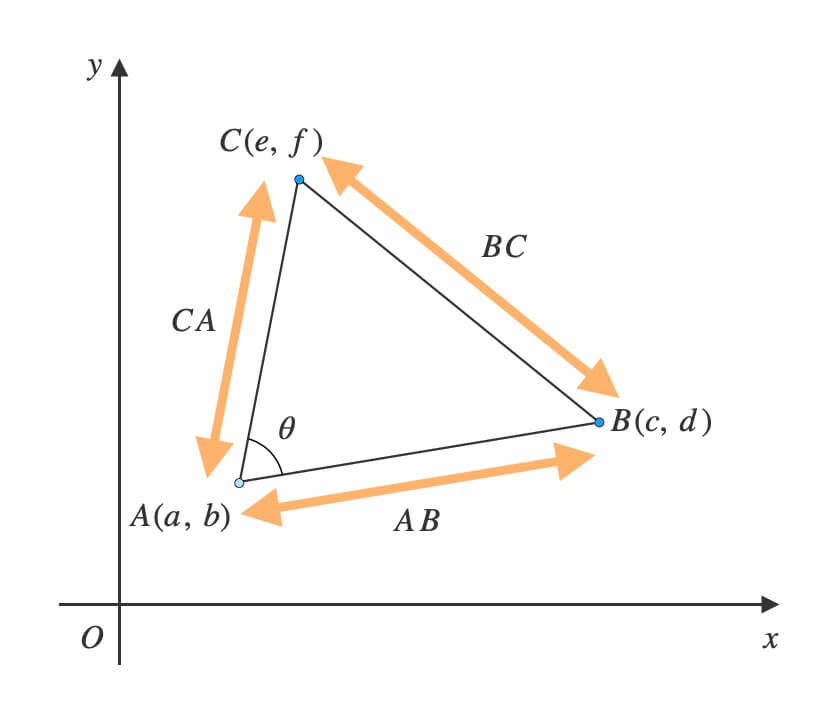
座標平面内に\(3\)点\(A(a,\ b)\), \(B(c,\ d)\), \(C(e,\ f)\) がある。
ただし、\(A\ne B\ne C\)とする。
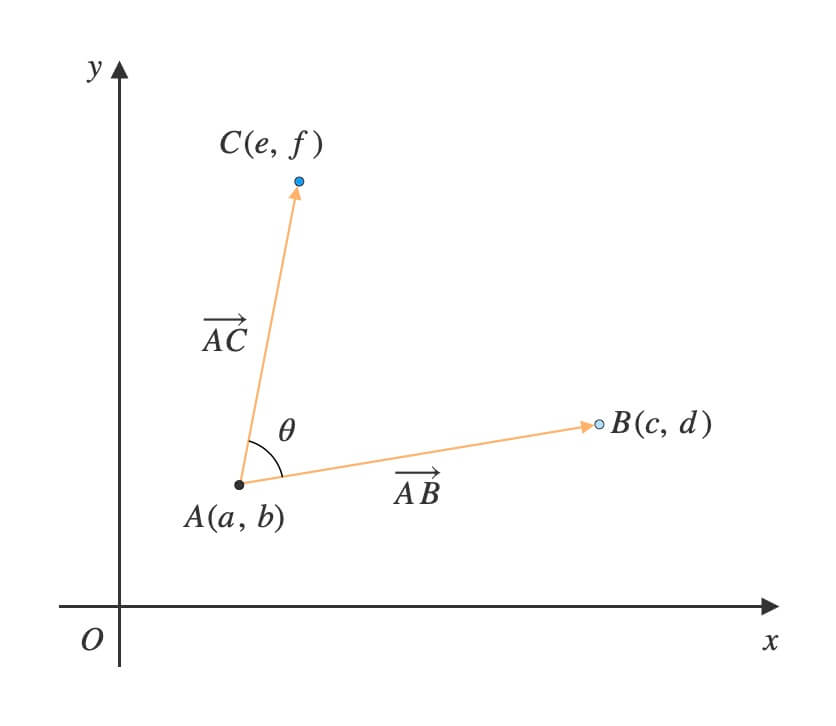
(1) ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)のなす角\(\theta\)を求めよ。
(2) ベクトル\(\overrightarrow{AB}\)に対して\(\overrightarrow{AC}\)は時計回りか反時計回りかを判別せよ。
解法を忘れてしまったり、そもそもどう解けばいいかわからない…という方が多いのではないでしょうか。
でもご安心ください!
記事を読めば、この問題の対処法を学べます。
合わせて、コンピュータに自動で解かせるためのプログラムもご紹介します。
3点から角度を求める2つの方法
まずは冒頭の問題の\((1)\)の答えを示します。
答え
\(\theta = \arccos{\frac{(c-a)(e-a) + (d-b)(f-b)}{\sqrt{{(c-a)}^2 + {(d-b)}^2}\sqrt{{(e-a)}^2 + {(f-b)}^2}}}\)
 すずか
すずか
 先生
先生
ベクトルの内積を使うやり方
手順は簡単。たった\(5\)ステップです。
\(1\)ステップずつ丁寧に解説しますね。
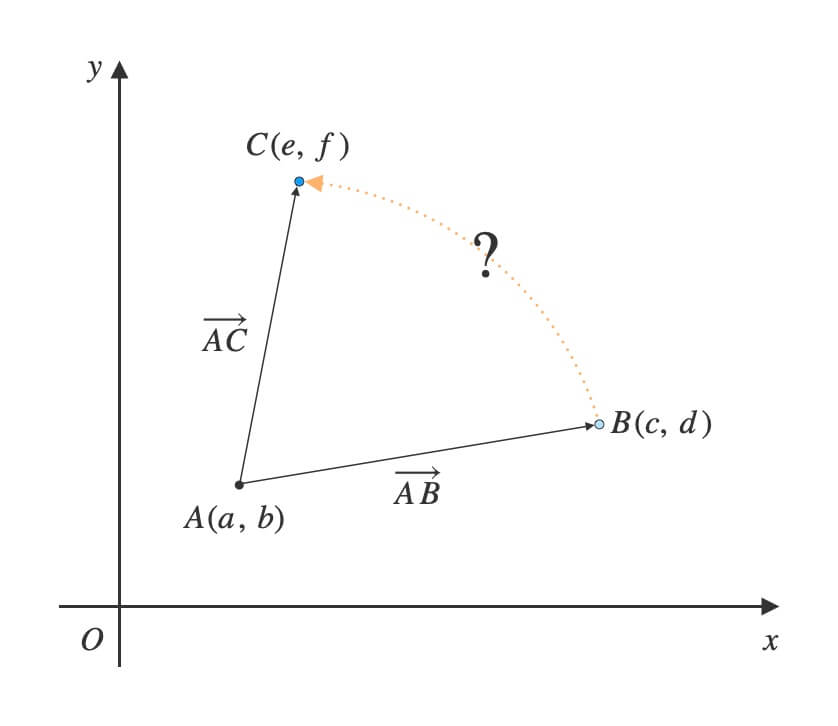
ベクトルを作る
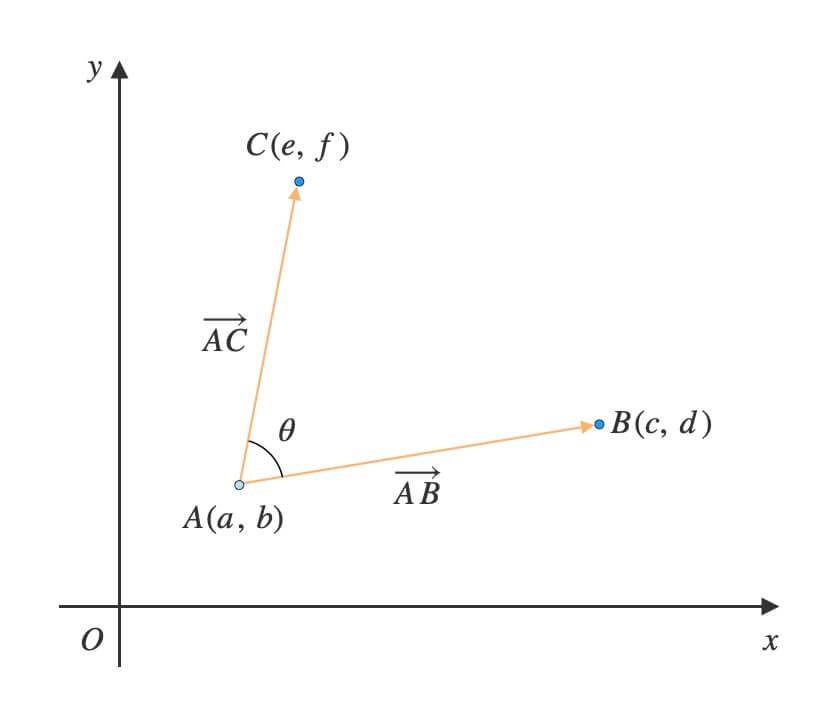
\(A\)を始点、\(B\)と\(C\)は終点とします。
このときベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)ができます。
\(A\), \(B\), \(C\)の各座標が分かっているので、ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)の成分表示が可能です。
\(A = (a_1,\ a_2)\)かつ\(B = (b_1,\ b_2)\) \(\Rightarrow \overrightarrow{AB} = (b_1 – a_1,\ b_2 – a_1)\)
各ベクトルの成分表示は次のようになります。
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)の成分表示
- \(\overrightarrow{AB}=(c-a,\ d-b)\)
- \(\overrightarrow{AC}=(e-a,\ f-b)\)
ベクトルの大きさを求める
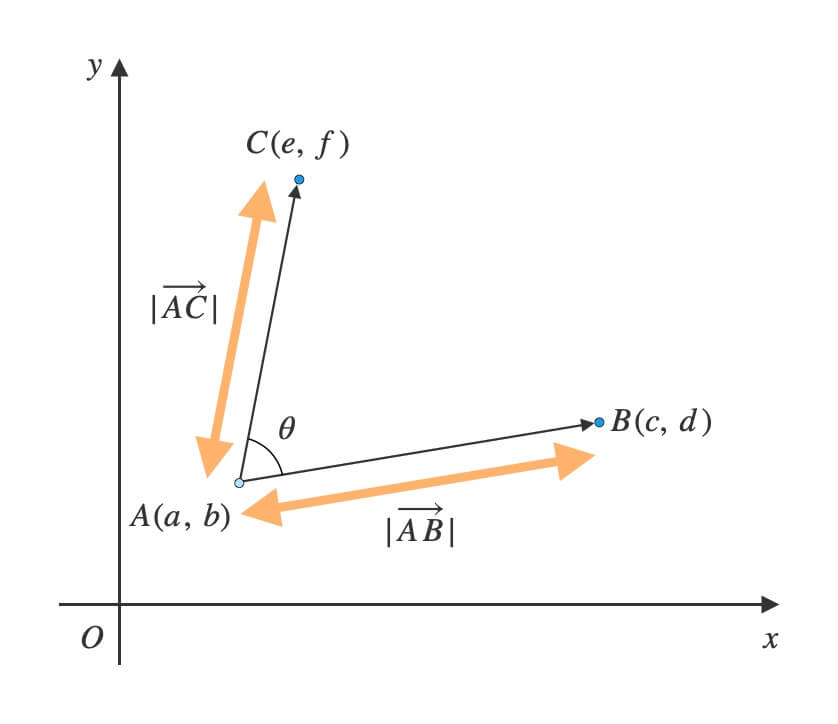
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)の大きさを求めます。
成分表示からベクトルの大きさを求めるには、次の公式を利用します。
\(\overrightarrow{a}=(a_1,\ a_2)\) \(\Rightarrow |\overrightarrow{a}| =\sqrt{a_1^2 + a_2^2} \)
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)の成分表示を既に求めてあるので、公式に当てはめて計算です。
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)の大きさ
- \(|\overrightarrow{AB}| = \sqrt{{(c-a)}^2 + {(d-b)}^2}\)
- \(|\overrightarrow{AC}| = \sqrt{{(e-a)}^2 + {(f-b)}^2}\)
ベクトルの内積を求める
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)の内積を求めます。
ベクトルの内積を求めるには、\(2\)通りの方法があります。
- \(\overrightarrow{a}=(a_1,\ a_2)\)かつ\(\overrightarrow{b}=(b_1,\ b_2)\) \(\Rightarrow \overrightarrow{a} \cdot \overrightarrow{b} = a_1b_1 + a_2b_2\)
- \(\overrightarrow{a}\)と\(\overrightarrow{b}\)のなす角が\(\theta\) \(\Rightarrow \overrightarrow{a} \cdot \overrightarrow{b} = |\overrightarrow{a}| |\overrightarrow{b}|\cos{\theta}\)
\(1\)の公式に、ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)の成分表示を当てはめましょう。
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)の内積
\(\overrightarrow{AB} \cdot \overrightarrow{AC} = (c-a)(e-a) + (d-b)(f-b)\)
角度の余弦を求める
\(\cos{\theta}\)を求めます。
内積の公式\(2\)より\(\overrightarrow{AB} \cdot \overrightarrow{AC} = |\overrightarrow{AB}| |\overrightarrow{AC}|\cos{\theta}\)とも表せました。
これを変形すると\(\cos{\theta} = \frac{\overrightarrow{AB} \cdot \overrightarrow{AC}}{|\overrightarrow{AB}| |\overrightarrow{AC}|}\)ですね。
\(\overrightarrow{AB} \ne \overrightarrow{0}\)かつ\(\overrightarrow{AC} \ne \overrightarrow{0}\)より、上記の式変形が許されます。
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)の内積と大きさを代入し、なす角\(\theta\)の余弦を求めます。
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)のなす角\(\theta\)の余弦
\(\cos{\theta} = \frac{(c-a)(e-a) + (d – b)(f – b)}{\sqrt{{(c-a)}^2 + {(d-b)}^2}\sqrt{{(e-a)}^2 + {(f-b)}^2}}\)
逆余弦関数で角度を求める
すずか
\(\cos{\theta}\)求めても意味なくない?
先生
結論、逆余弦関数を使います。
\(\cos{\theta} = x \Leftrightarrow \theta = \arccos{x}\) \((0\le\theta\le\pi)\)
要は、\(\cos{\theta}\)が〇〇になる角度\(\theta\)ってな〜んだ?
この角度\(\theta\)を求めるのが逆余弦関数です。
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)のなす角\(\theta\)の余弦は既に求めてあるので、これで\(\theta\)がわかります。
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)のなす角\(\theta\)
\(\theta = \arccos{\frac{(c-a)(e-a) + (d – b)(f – b)}{\sqrt{{(c-a)}^2 + {(d-b)}^2}\sqrt{{(e-a)}^2 + {(f-b)}^2}}}\)
お疲れ様でした。
以上が、ベクトルの内積を利用して\(3\)点の座標から角度を導出する流れです。
先ほどの答えと一致していますね。
余弦定理を使うやり方
手順は簡単。たった\(5\)ステップです。
\(1\)ステップずつ丁寧に解説しますね。
三角形を作る
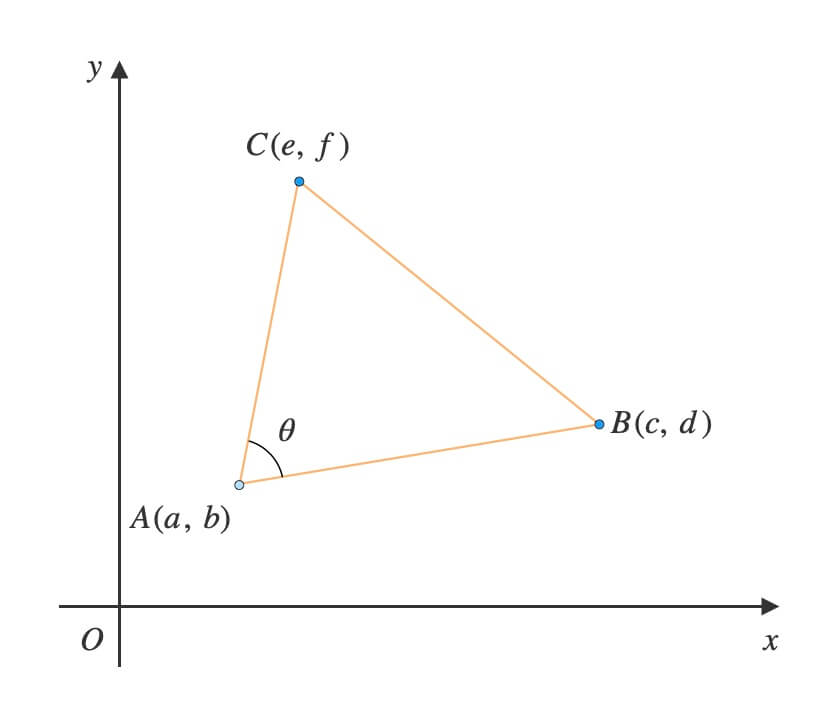
\(A\), \(B\), \(C\)を頂点とする三角形を作ります。
三角形の辺の長さを求める
辺\(AB\), \(BC\), \(CA\)の長さを求めます。
座標平面上の\(2\)点間の距離を求めるには、次の公式を利用します。
\(A=(a_1,\ a_2)\)かつ\(B=(b_1,\ b_2)\) \(\Rightarrow AB = \sqrt{{(a_1 – b_1)}^2 + {(a_2 – b_2)}^2}\)
よって、各辺の長さが求まります。
\(\triangle{ABC}\)の各辺の長さ
- \(AB = \sqrt{{(a – c)}^2 + {(b – d)}^2}\)
- \(BC = \sqrt{{(c – e)}^2 + {(d – f)}^2}\)
- \(CA = \sqrt{{(e – a)}^2 + {(f – b)}^2}\)
三角形に余弦定理を適用する
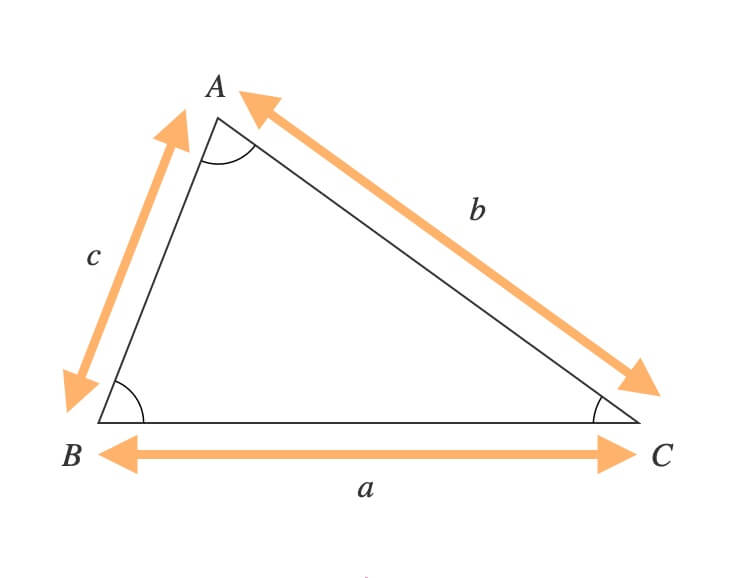
\(\triangle{ABC}\)について次が成り立つ。
\(a^2 = b^2 + c^2 – 2bc\cos{\angle{A}}\)
\(b^2 = c^2 + a^2 – 2ca\cos{\angle{B}}\)
\(c^2 = a^2 + b^2 – 2ab\cos{\angle{C}}\)
よって、\(\triangle{ABC}\)の各辺と\(\angle{A}\)に関して下記の等式が成り立ちます。
\(\triangle{ABC}\)の各辺と\(\angle{A}\) \((= \theta)\)の関係
\({BC}^2 = {AB}^2 + {CA}^2 – 2 \cdot AB \cdot CA \cdot \cos{\theta}\)
角度の余弦を求める
\(\cos{\theta}\)を求めます。
\(\triangle{ABC}\)の各辺と\(\theta\)の関係式を変形すると\(\cos{\theta} = \frac{{AB}^2 + {CA}^2 – {BC}^2}{2 \cdot AB \cdot CA}\)ですね。
\(\triangle{ABC}\)の各辺の大きさを代入し、\(\angle{A}\)\(( = \theta)\)の余弦を求めます。
\(\triangle{ABC}\)の\(\angle{A}\) \((= \theta)\)の余弦
\(\cos{\theta} = \frac{(c-a)(e-a) + (d – b)(f – b)}{\sqrt{{(c-a)}^2 + {(d-b)}^2}\sqrt{{(e-a)}^2 + {(f-b)}^2}}\)
次の\(4\)つの等式から導きます。
- \(AB = \sqrt{{(a – c)}^2 + {(b – d)}^2}\)
- \(BC = \sqrt{{(c – e)}^2 + {(d – f)}^2}\)
- \(CA = \sqrt{{(e – a)}^2 + {(f – b)}^2}\)
- \(\cos{\theta} = \frac{{AB}^2 + {CA}^2 – {BC}^2}{2 \cdot AB \cdot CA}\)
④に①・②・③を代入します。
\cos{\theta} &= \frac{{AB}^2 + {CA}^2 – {BC}^2}{2 \cdot AB \cdot CA} \\
\\\\
&=\frac{{\{\sqrt{{(a – c)}^2 + {(b – d)}^2}\}}^2 + {\{\sqrt{{(e – a)}^2 + {(f – b)}^2}\}}^2 – {\{\sqrt{{(c – e)}^2 + {(d – f)}^2}\}}^2}{2\sqrt{{(a – c)}^2 + {(b – d)}^2}\sqrt{{(e – a)}^2 + {(f – b)}^2}} \\
\\\\
&=\frac{\{{(a – c)}^2 + {(b – d)}^2\} + \{{(e – a)}^2 + {(f – b)}^2\} – \{{(c – e)}^2 + {(d – f)}^2\}}{2\sqrt{{(a – c)}^2 + {(b – d)}^2}\sqrt{{(e – a)}^2 + {(f – b)}^2}} \\
\\\\
&=\frac{(a^2 – 2ac + c^2) + (b^2 – 2bd + d^2) + (e^2 – 2ea + a^2) + (f^2 – 2fb + b^2) – (c^2 – 2ce + e^2) – (d^2 – 2df + f^2)}{2\sqrt{{(a – c)}^2 + {(b – d)}^2}\sqrt{{(e – a)}^2 + {(f – b)}^2}} \\
\\\\
&=\frac{\{(2a^2 – 2ac – 2ea + 2ce) + (2b^2 – 2bd – 2fb + 2df)\} + (c^2 + d^2 + e^2 + f^2) – (c^2 + d^2 + e^2 + f^2)}{2\sqrt{{(a – c)}^2 + {(b – d)}^2}\sqrt{{(e – a)}^2 + {(f – b)}^2}} \\
\\\\
&=\frac{2\{(a^2 – ac – ea + ce) + (b^2 – bd – fb + df)\}}{2\sqrt{{(a – c)}^2 + {(b – d)}^2}\sqrt{{(e – a)}^2 + {(f – b)}^2}} \\
\\\\
&=\frac{\{a^2 – (c + e)a + ce\} + \{b^2 – (d + f)b + df\}}{\sqrt{{(a – c)}^2 + {(b – d)}^2}\sqrt{{(e – a)}^2 + {(f – b)}^2}} \\
\\\\
&=\frac{(a – c)(a – e) + (b – d)(b – f)}{\sqrt{{(a – c)}^2 + {(b – d)}^2}\sqrt{{(e – a)}^2 + {(f – b)}^2}} \\
\\\\
&=\frac{(c – a)(e – a) + (d – b)(f – b)}{\sqrt{{(c – a)}^2 + {(d – b)}^2}\sqrt{{(e – a)}^2 + {(f – b)}^2}} \\
\end{align*}
逆余弦関数で角度を求める
すずか
先生
結論、逆余弦関数を使います。
\(\cos{\theta} = x \Leftrightarrow \theta = \arccos{x}\) \((0\le\theta\le\pi)\)
要は、\(\cos{\theta}\)が〇〇になる角度\(\theta\)ってな〜んだ?
この角度\(\theta\)を求めるのが逆余弦関数です。
\(\triangle{ABC}\)の\(\angle{A}\) \((=\theta)\)の余弦は既に求めてあるので、これで\(\theta\)がわかります。
\(\triangle{ABC}\)の\(\angle{A}\) \((= \theta)\)
\(\theta = \arccos{\frac{(c-a)(e-a) + (d – b)(f – b)}{\sqrt{{(c-a)}^2 + {(d-b)}^2}\sqrt{{(e-a)}^2 + {(f-b)}^2}}}\)
計算が少し大変でしたね。
以上が、余弦定理を利用して\(3\)点の座標から角度を導出する流れです。
どちらでも同じ答えが出るのは面白いですね!
3点から回転方向を求める方法
お次は冒頭の問題の\((2)\)の答えを示します。
答え
- \((c-a)(f-b)-(d-b)(e-a)>0\Rightarrow反時計回り\)
- \((c-a)(f-b)-(d-b)(e-a)<0\Rightarrow時計回り\)
- \((c-a)(f-b)-(d-b)(e-a)=0\Rightarrow回転なし\)
すずか
先生
結論、ベクトルの外積を利用します。
手順は簡単。たった\(3\)ステップです。
\(1\)ステップずつ丁寧に解説しますね。
ベクトルを作る
\(A\)を始点、\(B\)と\(C\)は終点とします。
このときベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)ができます。
\(A\), \(B\), \(C\)の各座標が分かっているので、ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)の成分表示が可能です。
\(A = (a_1,\ a_2)\)かつ\(B = (b_1,\ b_2)\) \(\Rightarrow \overrightarrow{AB} = (b_1 – a_1,\ b_2 – a_1)\)
各ベクトルの成分表示は次のようになります。
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)の成分表示
- \(\overrightarrow{AB}=(c-a,\ d-b,\ 0)\)
- \(\overrightarrow{AC}=(e-a,\ f-b,\ 0)\)
すずか
先生
何も難しくはありません。
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)は座標平面上にあるので、\(z\)成分は\(0\)ですよね。
ベクトルの外積を求める
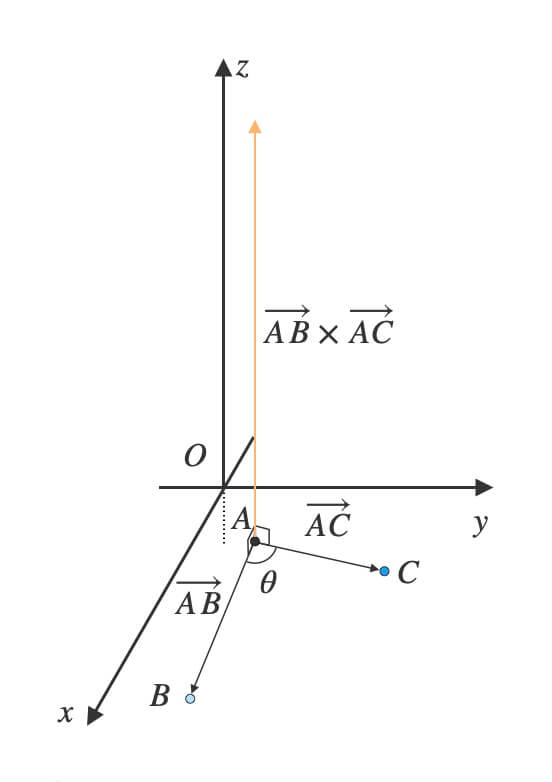
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)の外積を求めます。
ベクトルの外積を求めるには、次の公式を利用します。
\(\overrightarrow{a}=(a_1,\ a_2, a_3)\)かつ\(\overrightarrow{b}=(b_1,\ b_2, b_3)\) \(\Rightarrow \overrightarrow{a} \times \overrightarrow{b} = (a_2b_3-a_3b_2,\ a_3b_1-a_1b_3,\ a_1b_2-a_2b_1)\)
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)の成分表示を既に求めてあるので、公式に当てはめるだけです。
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)の外積
\(\overrightarrow{AB} \times \overrightarrow{AC} = (0,\ 0,\ (c-a)(f-b)-(d-b)(e-a))\)
外積の\(z\)成分で回転方向を判別
外積の\(z\)成分の符号で回転方向がわかります。
回転方向には次の\(3\)通りがあります。
- \(z成分>0\Rightarrow\)反時計回り
- \(z成分<0\Rightarrow\)時計回り
- \(z成分=0\Rightarrow\)回転なし
ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)の外積は既に求めてあるため、その\(z\)成分で回転方向を判別します。
ベクトル\(\overrightarrow{AB}\)に対する\(\overrightarrow{AC}\)の回転方向
- \((c-a)(f-b)-(d-b)(e-a)>0\Rightarrow反時計回り\)
- \((c-a)(f-b)-(d-b)(e-a)<0\Rightarrow時計回り\)
- \((c-a)(f-b)-(d-b)(e-a)=0\Rightarrow回転なし\)
以上、\(3\)点から回転方向を求める方法でした。
すずか
では、コンピューターにこの計算をお願いしましょう。
先生
プログラムを実装
先ほどの理論を踏まえた上で、Pythonでプログラムを書いてみましょう。
実装例は\(3\)つご用意しました。
ニーズに合わせてお選びください。
角度を求める
import numpy as np
def get_angle(point_a, point_b, reference_point, is_radian=False):
# 点Aまたは点Bが基準点と同じ場合、角度は0を返す
if point_a == reference_point or point_b == reference_point:
return 0
# ベクトルを計算
reference_point = np.array(reference_point)
vector_a = np.array(point_a) - reference_point
vector_b = np.array(point_b) - reference_point
# ベクトルの大きさ(長さ)を計算
magnitude_a = np.linalg.norm(vector_a)
magnitude_b = np.linalg.norm(vector_b)
# 内積を計算
dot_product = np.dot(vector_a, vector_b)
# 余弦を計算
cosine = dot_product / (magnitude_a * magnitude_b)
# 逆余弦関数を計算して角度を取得
angle = np.arccos(cosine)
# 弧度法指定ではない場合、角度を度数法に変換
return angle if is_radian else np.degrees(angle)
get_angle関数は\(3\)点の座標から角度を求めます。
引数は次の\(4\)つです。
point_a: 点Aの座標(リスト or タプル)point_b: 点Bの座標(リスト or タプル)reference_point: 基準点の座標(リスト or タプル)is_radian: Trueだと角度を弧度法で、False(デフォルト)だと度数法で返す。
戻り値は角度です。
angle: 角度。引数is_radianで単位を指定。
回転方向を求める
import numpy as np
def get_rotation_direction(from_point, to_point, reference_point):
# 始点または終点が基準点と同じ場合、回転方向は定義しない
if from_point == reference_point or to_point == reference_point:
return 'undefined'
# 始点と終点からベクトルを計算
reference_point = np.array(reference_point)
from_vector = np.array(from_point) - reference_point
to_vector = np.array(to_point) - reference_point
# 外積を計算
cross_product = np.cross(from_vector, to_vector)
# 外積の符号に応じて角度を調整
return 'anti-clockwise' if cross_product >= 0 else 'clockwise'
get_rotation_direction関数は\(3\)点の座標から回転方向を求めます。
引数は次の\(3\)つです。
from_point: 回転の始点の座標(リスト or タプル)to_point: 回転の終点の座標(リスト or タプル)reference_point: 回転の中心点の座標(リスト or タプル)
戻り値は文字列です。
'clockwise': 時計回り。\(0^{\circ}\)回転も含む。'anti-clockwise': 反時計回り。'undefined': 回転を考えない。
\(3\)次元座標空間上の点には対応しておりませんのでご注意ください。
角度と回転方向を求める
def get_signed_angle(from_point, to_point, reference_point, is_radian=False):
angle = get_angle(from_point, to_point, reference_point, is_radian)
rotation_direction = get_rotation_direction(from_point, to_point, reference_point)
return angle if rotation_direction == 'anti-clockwise' else -angleget_signed_angle関数は角度と回転方向を求めます。
回転方向は、戻り値の符号で判断できます。
引数は次の\(4\)つです。
from_point: 回転の始点の座標(リスト or タプル)to_point: 回転の終点の座標(リスト or タプル)reference_point: 回転の中心点の座標(リスト or タプル)is_radian: Trueだと角度を弧度法で、False(デフォルト)だと度数法で返す。
戻り値は角度です。
angle: 角度。\(0\)以上で時計回り、\(0\)未満で半時計回り。
\(3\)次元座標空間上の点には対応しておりませんのでご注意ください。
プログラムの試験
角度を求める
\(3\)点の座標から角度を求めるget_angle関数のテストを行います。
座標平面上の\(3\)点
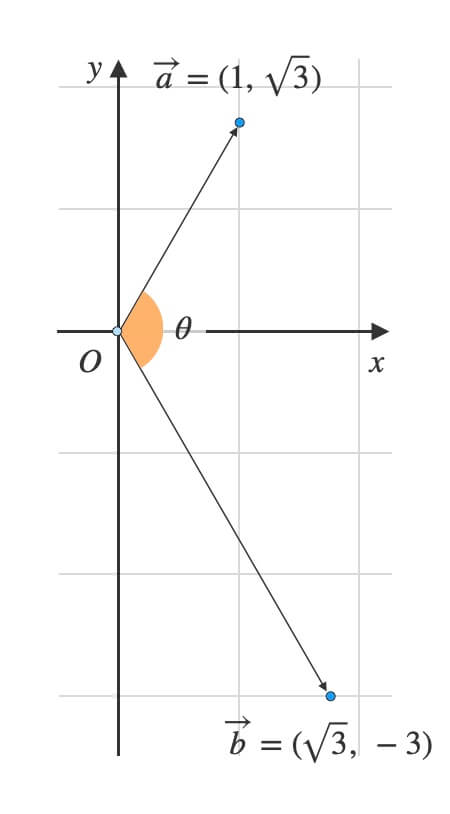
ベクトル\(\overrightarrow{a} = (1,\ \sqrt{3})\)と\(\overrightarrow{b}=(\sqrt{3},\ -3)\)のなす角\(\theta\)を求めよ。
答え
\(\theta = 120^{\circ}\)
get_angle関数の下に、次のコード書いて実行します。
a = (1, np.sqrt(3))
b = (np.sqrt(3), -3)
o = (0, 0)
answer = get_angle(a, b, o)
print(answer)実行結果です。
print(answer)
# 120.00000000000001先生
座標空間上の\(3\)点
空間の\(3\)点\(A(1,\ −2,\ 3)\), \(B(3,\ −4,\ 2)\), \(C(−3,\ 3,\ 0)\)に対して,ベクトル\(\overrightarrow{AB}\)と\(\overrightarrow{AC}\)のなす角を求めよ。
[05 福井県立大]
答え
\(135^{\circ}\)
get_angle関数の下に、次のコード書いて実行します。
A = (1, -2, 3)
B = (3, -4, 2)
C = (-3, 3, 0)
answer = get_angle(B, C, A)
print(answer) 実行結果です。
print(answer)
# 135.0回転方向を求める
先ほどの問題を流用します。
ベクトル\(\overrightarrow{a} = (1,\ \sqrt{3})\)に対して\(\overrightarrow{b} = (\sqrt{3},\ -3)\)はどちら回りの回転か。
答え
時計回り
get_rotation_direction関数の下に、次のコード書いて実行します。
a = (1, np.sqrt(3))
b = (np.sqrt(3), -3)
o = (0, 0)
answer = get_rotation_direction(a, b, o)
print(answer)実行結果です。
print(answer)
# clockwise角度と回転方向を求める
先ほどの問題を流用します。
ベクトル\(\overrightarrow{a} = (1,\ \sqrt{3})\)に対して\(\overrightarrow{b} =(\sqrt{3},\ -3)\)は反時計回りに何度回転しているか。
答え
\(-120^{\circ}\)
すずか
先生
get_signed_angle関数の下に、次のコード書いて実行します。
a = (1, np.sqrt(3))
b = (np.sqrt(3), -3)
o = (0, 0)
answer = get_rotation_direction(a, b, o)
print(answer)実行結果です。
print(answer)
# -120.00000000000001角度と回転方向が同時に求まりました。
プログラムの活用例
図形をマウスドラッグで回転させるプログラムです。
PythonのGUIライブラリであるTkinterで作りました。
複雑そうですが、仕組みはシンプルです。
マウスカーソルの位置が変化するたびに、次の\(3\)点から回転角度を求めています。
- カーソルの現在位置
- カーソルの移動前の位置
- 図形の重心
次に、求めた角度を元に図形の頂点を回転移動させるだけです。
現在Tkinter搭載の関数では、図形を回転させることはできません。
しかし、今回ご紹介した点を回転させるプログラムを上手く使うと、このようにクルクル回すことが出来るのです。
Tkinterで図形を回転させるプログラムに関する記事は、近日中に公開します!
まとめ
今回は、\(3\)点の座標から角度と回転方向を求める方法について解説しました。
角度を求める方法は\(2\)通りありましたね。
上記いずれのやり方でも、余弦と逆余弦関数が重要でした。
また、回転方向は外積の\(z\)成分で判別します。
- \(z成分>0\Rightarrow\)反時計回り
- \(z成分<0\Rightarrow\)時計回り
- \(z成分=0\Rightarrow\)回転なし
本記事でご紹介した内容は、特にゲーム制作で用いられる技術です。
自分でPCゲームを作る際には是非参考にしてくださいね。
最後までお付き合いいただき、ありがとうございました。